"现在设置了几个机器人,其中含有相同的功能,比如都需要打印文件。为了维护简单,打算单独写一个公共机器人,其目的是把相同的功能进行封装,然后直接调用就可以了。请问怎么给流程传参数,流程怎么接收参数? [图片]"
现在设置了几个机器人,其中含有相同的功能,比如都需要打印文件。为了维护简单,打算单独写一个公共机器人,其目的是把相同的功能进行封装,然后直接调用就可以了。请问怎么给流程传参数,流程怎么接收参数?
感谢大佬的指教
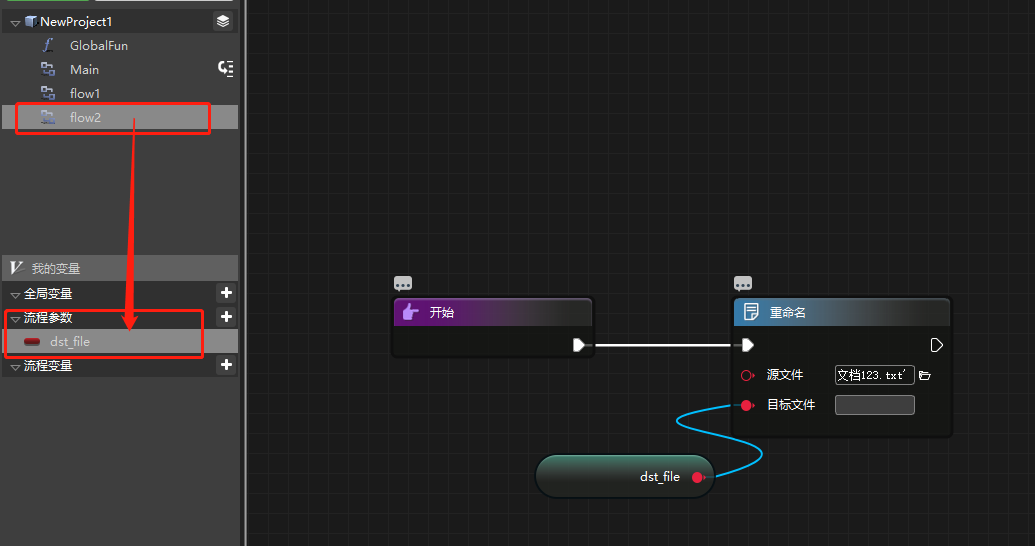
在流程中设置“流程参数”:
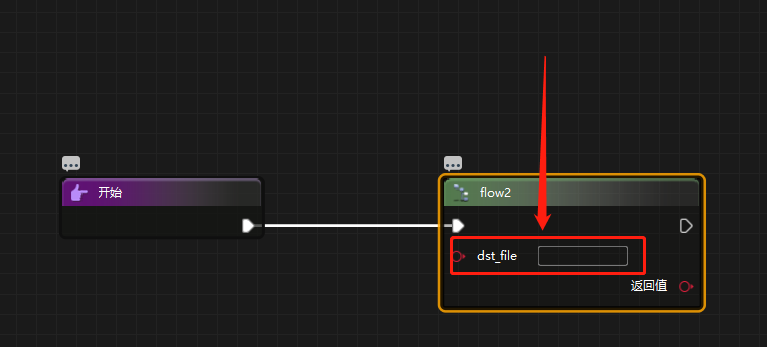
调用该流程时便需要传入参数了:



感谢大佬的指教
在流程中设置“流程参数”:
调用该流程时便需要传入参数了: