

iS-RPA 9.0 前瞻系列 - 机器人共享
其实我们艺赛旗的 RPA 体系,在语言框架方面,是完整使用 python 的,因此在共享机器人这一场景下,大家很容易就能想象怎么使用,使用机制就是 package 的安装和 import
首先,你可以尝试发布机器人为库文件
- 在工具菜单中,可以看到机器人上传、机器人同步、机器人浏览
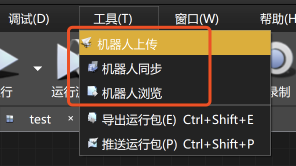
- 机器人上传:你可以把当前工程作为库发布到服务器
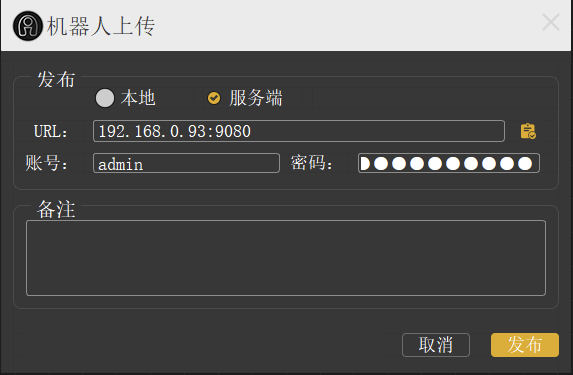
- 机器人上传:你也可以把当前工程作为库发布到本地(机器人和设计安装在统一目录)
- 你可以浏览安装的机器人库,库文件安装在
C:\iS-RPA\plugin\Com.Isearch.Func.Python\Lib\ubpalib下,文件名就是共享的机器人名称 - 机器人会自动同步服务器的机器人库,但是设计器不会,因此设计器可能需要你手动选择机器人同步菜单来同步服务器的机器人库文件
通过上面的简单操作,当前工程的机器人发布就完成了
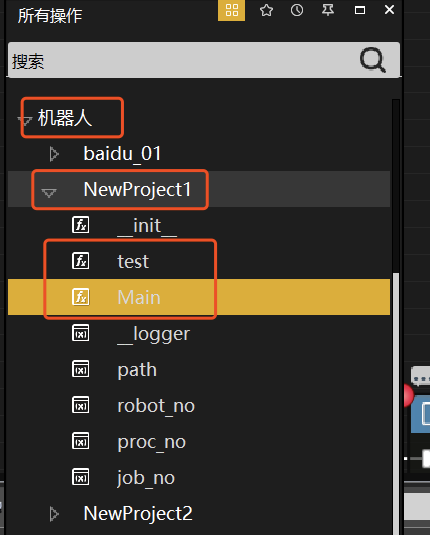
机器人定义
- 机器人是一个面向对象的实现
- 大家首先定义一个变量
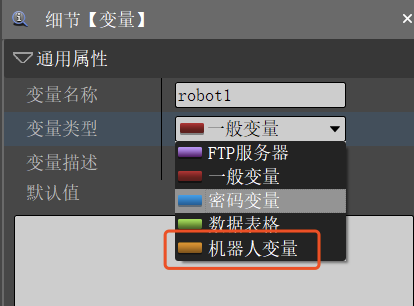
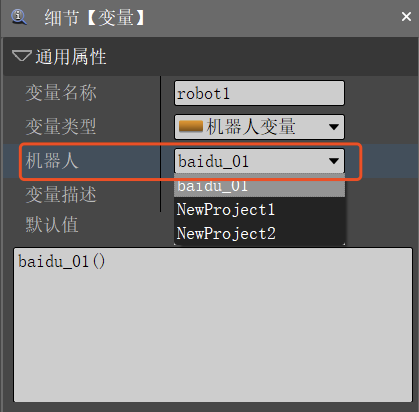
- 然后大家可以选择实例化的类(指定这个机器人是哪种机器人)
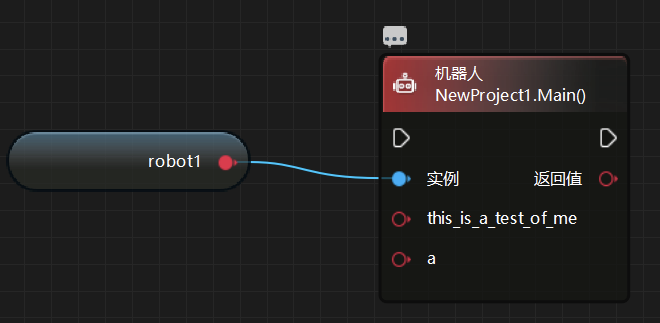
机器人工作
-
在菜单中,可以看到机器人类的流程和全局变量,你可以随意引用他们
-
你可以指挥你的机器人,执行预定好的流程,当然也可以临时传递和改变各种全局变量和参数
顺便说一下,原来使用 import 方法的时候,globalFun 会冲突的问题、日志会多重打印的问题,我们也一并解决了,大家放心的使用吧
怎么样,很简单吧?
