
机器人运行状态报表
-
增加日志采集
1.1 编辑 logstash 配置文件
配置 RPA 服务器 logstash
vi /isearch/isa/conf/logstash/logstash.conf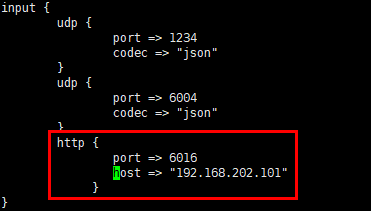
如果是双机或者集群,这里的 IP 都只写服务器本机 IP
1.2 重启 logstash
每台修改的都需要重启。
/isearch/bin/logstash.sh stop
/isearch/bin/logstash.sh start -
增加发送 http 日志功能的返回值
修改 http_sender.py 文件,下图红圈中的内容:
C:\iS-RPA\plugin\Com.Isearch.Func.Python\Lib\ubpa\itools\http_sender.py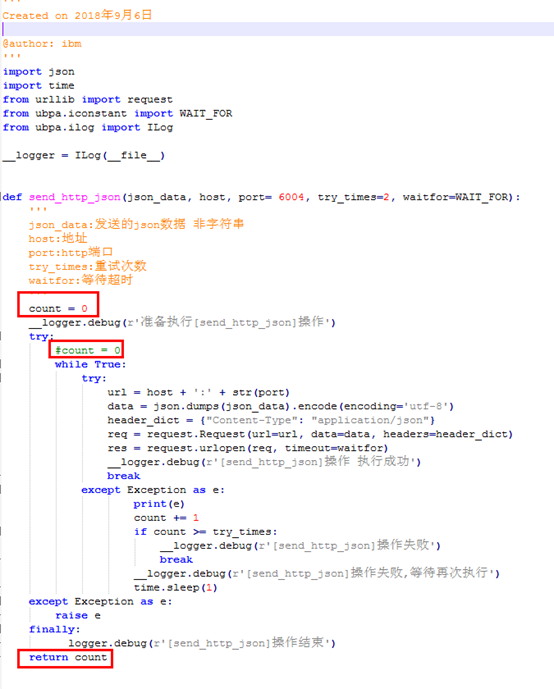
- 增加全局函数
可以修改 serviceweb 传参为 List 以便配合群集,这里以双机举例。
import time
import ubpa.itools.http_sender as http_sender
import json
def rb_run_info(rcode,rname,rb_runname,rb_runinfo,rb_starttime,rb_state,serviceweb1=‘http://192.168.202.101’,serviceweb2=‘http://192.168.202.102’,webport=6016,retry=3):
#工程名 rcode
#流程名 rname
#步骤名 rb_runname
#步骤信息 rb_runinfo
#步骤时间 rb_runtime
#工作状态 rb_state
#工作时间 (秒) rb_duration_s
#工作时间 (分) rb_duration_m
#http 发送重试次数 retry
#获取当前时间
rb_runtime = time.strftime("%Y-%m-%d %H:%M:%S",time.localtime(time.time()))
#计算当前时间戳
run_timestamp = int(time.mktime(time.strptime(rb_runtime, "%Y-%m-%d %H:%M:%S")))
#计算开始时间戳
#rb_starttime=rb_starttime
start_timestamp = int(time.mktime(time.strptime(rb_starttime, "%Y-%m-%d %H:%M:%S")))
#计算运行时间间隔
rb_duration_s=run_timestamp-start_timestamp
rb_duration_m=rb_duration_s/60
rb_duration_m=round(rb_duration_m,2)
data_json=[{"rcode":rcode,"rname":rname,"rb_runname":rb_runname,"rb_runinfo":rb_runinfo,"rb_runtime":rb_runtime,"rb_starttime":rb_starttime,"rb_state":rb_state,"rb_duration_s":rb_duration_s,"rb_duration_m":rb_duration_m}]
http_result=http_sender.send_http_json(data_json,host=serviceweb1,port=webport,try_times=retry)
if http_result>0:
print('主服务器尝试失败,将尝试备服务器。')
http_result=http_sender.send_http_json(data_json,host=serviceweb2,port=webport,try_times=retry)
if http_result>0:
print('http日志发送失败。')
return False
else:
print('http日志发送成功。'+serviceweb1)
return True
else:
print('http日志发送成功:'+serviceweb2)
return True
-
使用方法
在关键节点使用,如开始、结束、子流程等关键步骤。 -
效果展示
5.1 机器人日志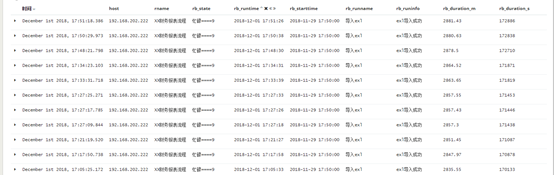
5.2 机器人趋势图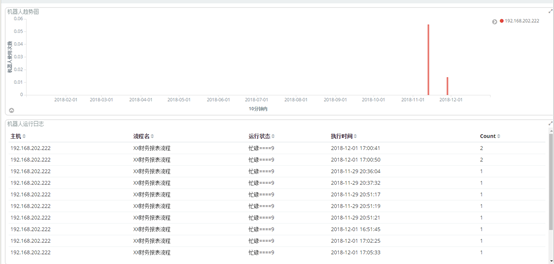
5.3 字段解释

👍🏻👍🏻这个对做报表很有用了